Simulink生成ROS功能包的步骤总结
本文共 360 字,大约阅读时间需要 1 分钟。
-
step1:搭建仿真模型,注意两个问题,①ROS话题输出的信号类型是
single类型,而Simulink输出的类型是double类型,因此可使用Data Type Conversion模块实现类型转换;②连续积分器Integrator不支持代码生成,建议自己搭,如下图所示。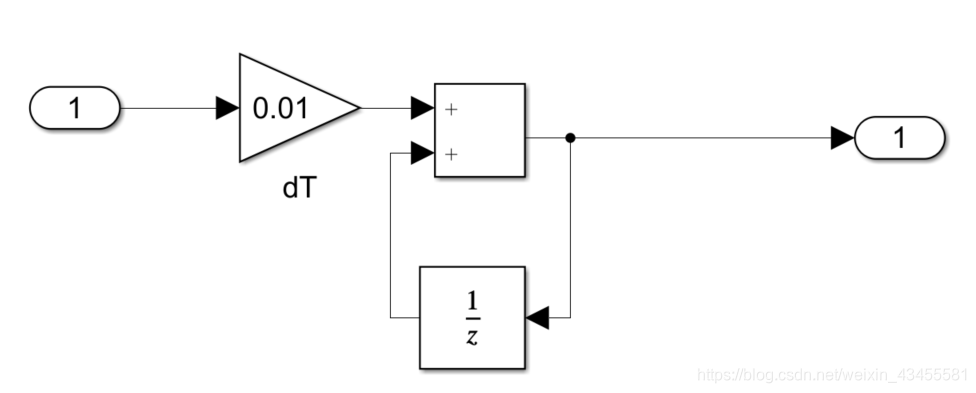
-
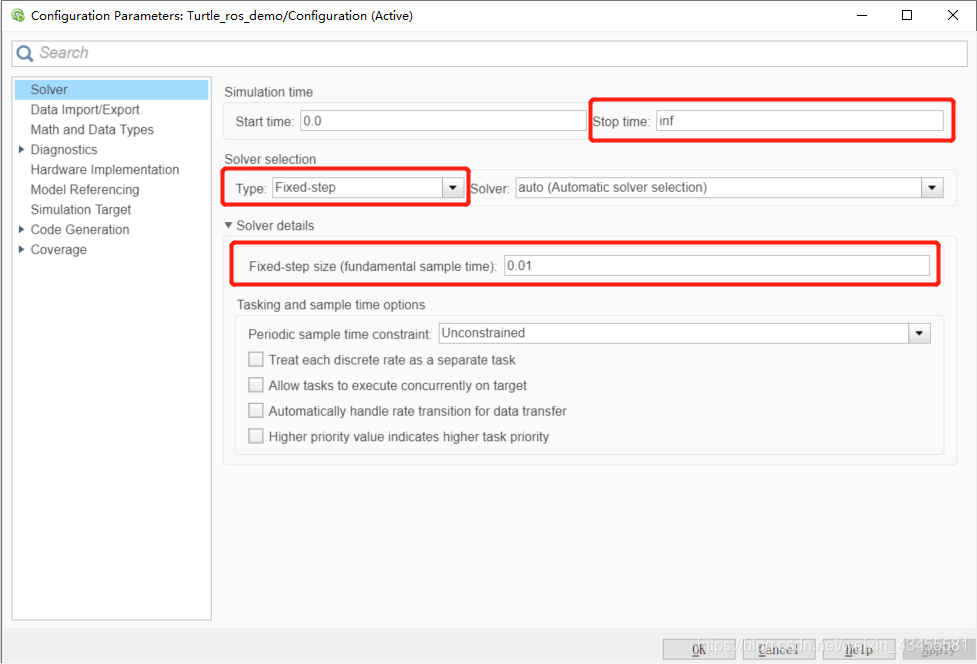
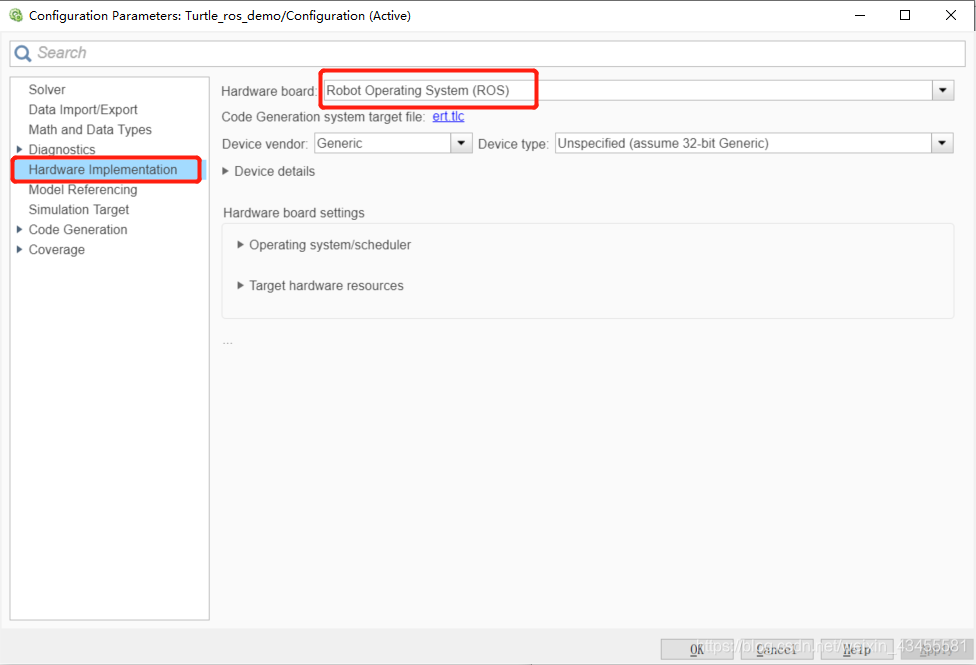
step2:设置求解器及求解步长等参数。
-
step3:生成代码
 我们只关心生成的压缩包和sh脚本,其中脚本是用来安装压缩包到工作目录的。
我们只关心生成的压缩包和sh脚本,其中脚本是用来安装压缩包到工作目录的。 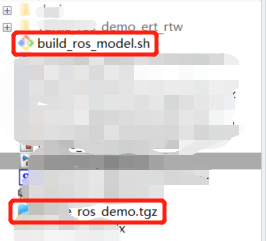
-
step4:
bash build_ros_model.sh xxxx.tgz ~/工作空间,注意不是放在src文件夹下,直接在工作空间下运行脚本即可,此时会自动编译。 -
step5:测试生成的代码,记得要
source工作空间,然后rosrun即可,编译好的结点程序在/工作空间/devel/lib目录下查看。
转载地址:http://uyzxf.baihongyu.com/
你可能感兴趣的文章
几种Bootloader简介
查看>>
Windows下建立eCos开发环境(4)-eCos源代码安装
查看>>
华恒2410常见问题
查看>>
Bootloader
查看>>
社会生活中的著名法则
查看>>
职场十句不败的话——转载
查看>>
Linux下的glimpse工具和tee命令
查看>>
嵌入式系统中U-Boot基本特点及其移植方法
查看>>
ecos vector.S 分析II: exception/interrupt
查看>>
7个成功的信念ZZ
查看>>
大脑与意志(转贴)
查看>>
采用ROM监控器的调试技巧分析-
查看>>
Samsung ATM920T S3C2410x Initialization Code- -
查看>>
useful URL
查看>>
redboot startup process
查看>>
Learn lumit Step 9 : 使用 JTAG 调试
查看>>
使用ADS1.2进行嵌入式软件开发(下)
查看>>
ARM初始化
查看>>
S3C2410快速启动的实现
查看>>
查看Linux文件目录的大小和文件夹包含的文件数
查看>>